Difference between revisions of "Attitude Determination and Control (ADCS)"
Jump to navigation
Jump to search
| Line 1: | Line 1: | ||
| − | An Attitude Determination and Control (ADCS) provides measurements regarding a satellite's orbit and allows the satellite to change its inertial position. | + | An Attitude Determination and Control System (ADCS) provides measurements regarding a satellite's orbit and allows the satellite to change its inertial position. |
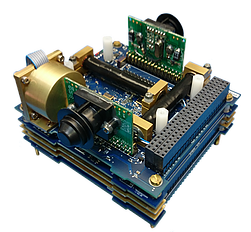
[[File:Cubesat_adcs.png|frame|none|alt=Alt text|CubeSpace ADCS]] | [[File:Cubesat_adcs.png|frame|none|alt=Alt text|CubeSpace ADCS]] | ||
| + | |||
| + | == Core Components of an ADCS System == | ||
| + | |||
| + | * Kalman Filter | ||
| + | ** A Kalman Filter is a probabilistic system that keeps track of a best estimate of its state (attitude) and its uncertainty, updating this estimate based on sensor inputs over time. | ||
| + | * Sensors | ||
| + | ** Sensors could include star sensors, star trackers, IMUs, anything that gives the satellite measurements about its attitude. A large part of a building a well-functioning attitude determination and control system involves designing algorithms that preprocess and computes a sensor's estimate of the attitude based on its raw measurements (e.g. matching a picture taken by a star tracker to a star database). | ||
| + | * Actuators | ||
| + | ** Actuators include any physical devices that allow for the rotation of the satellite. A key component of ADCS is to design and implement algorithms that compute optimal actuations to manipulate the attitude as intended. | ||
== Examples of ADCS Hardware == | == Examples of ADCS Hardware == | ||
Latest revision as of 20:05, 8 August 2020
An Attitude Determination and Control System (ADCS) provides measurements regarding a satellite's orbit and allows the satellite to change its inertial position.

CubeSpace ADCS
Core Components of an ADCS System
- Kalman Filter
- A Kalman Filter is a probabilistic system that keeps track of a best estimate of its state (attitude) and its uncertainty, updating this estimate based on sensor inputs over time.
- Sensors
- Sensors could include star sensors, star trackers, IMUs, anything that gives the satellite measurements about its attitude. A large part of a building a well-functioning attitude determination and control system involves designing algorithms that preprocess and computes a sensor's estimate of the attitude based on its raw measurements (e.g. matching a picture taken by a star tracker to a star database).
- Actuators
- Actuators include any physical devices that allow for the rotation of the satellite. A key component of ADCS is to design and implement algorithms that compute optimal actuations to manipulate the attitude as intended.
Examples of ADCS Hardware
- Most ADCS hardware relies on an ability to change the satellite's position relative to the Earth.
- Reaction wheels: Using small, spinning wheels, reaction wheels allow satellite positioning using the principle of conservation of momentum.
- CubeADCS: CubeSpace's CubeADCS utilizes a variety of sensors (including magnetometers and sun sensors) to accurately determine the satellite's precision. It can use either magnetic torquers (see below) or reaction wheels for attitude determination.
- Magnetorquer: By creating a magnetic field that interact's with the Earth's own magnetic field, a magnetic torquer produces a force that can rotate a satellite.
- Control Moment Gyros: Similar to Reaction Wheels, Control Moment Gyros use a gimbal to change the rotation of a spinning flywheel. See https://www.youtube.com/watch?v=JTWA6tUREi8 for an excellent visual demonstration of CMG technology.
- Thrusters: Though far more uncommon on small satellites, thrusters remain a dependable and conceptually straightforward method of attitude determination.
- Reaction wheels: Using small, spinning wheels, reaction wheels allow satellite positioning using the principle of conservation of momentum.
ADCS Specifications
- ADCS Pointing Accuracy
- ADCS accuracy varies depending on the type and quality of mechanisms and control systems. The popular CubeSpace hardware used on 2U QB50 satellites has an accuracy of 0.2º to 0.6º (keep in mind, however, that the QB50 missions requirements regarding ADCS precision are fairly lax). The BlueCanyon XB1 high precision ADCS suggests an accuracy of 0.002º.
- ADCS Maneuvering Rates